夾持使用的機器人設計模型
- 文件介紹:
- 該文件為 zip 格式,下載需要 10 積分
-
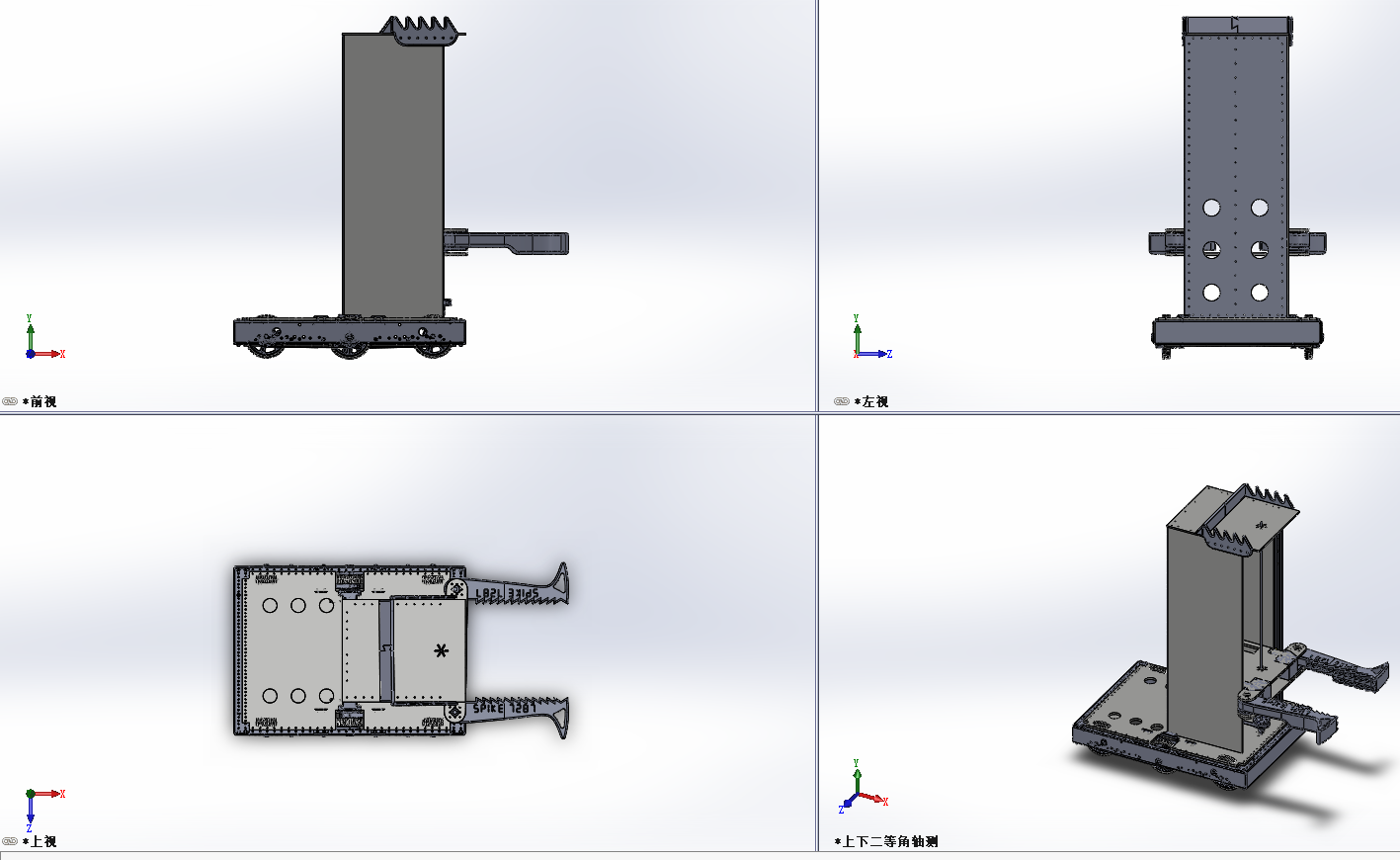
- 夾持使用的機器人設計模型這是一款用于夾持使用的機器人設計圖,一般由執行機構、驅動裝置、檢測裝置和控制系統和復雜機械等組成。機器人本體,其臂部一般采用空間開鏈連桿機構,其中的運動副(轉動副或移動副)常稱為關節,關節個數通常即為機器人的自由度數。根據關節配置型式和運動坐標形式的不同,機器人執行機構可分為直角坐標式、圓柱坐標式、極坐標式和關節坐標式等類型。出于擬人化的考慮,常將機器人本體的有關部位分別稱為基座、腰部、臂部、腕部、手部(夾持器或末端執行器)和行走部(對于移動機器人)等。...
 熱門關鍵詞:
熱門關鍵詞: 

