3個自由度搬運機械手設計【CAD圖紙+畢業論文】
- 文件介紹:
- 該文件為 zip 格式,下載需要 10 積分
-
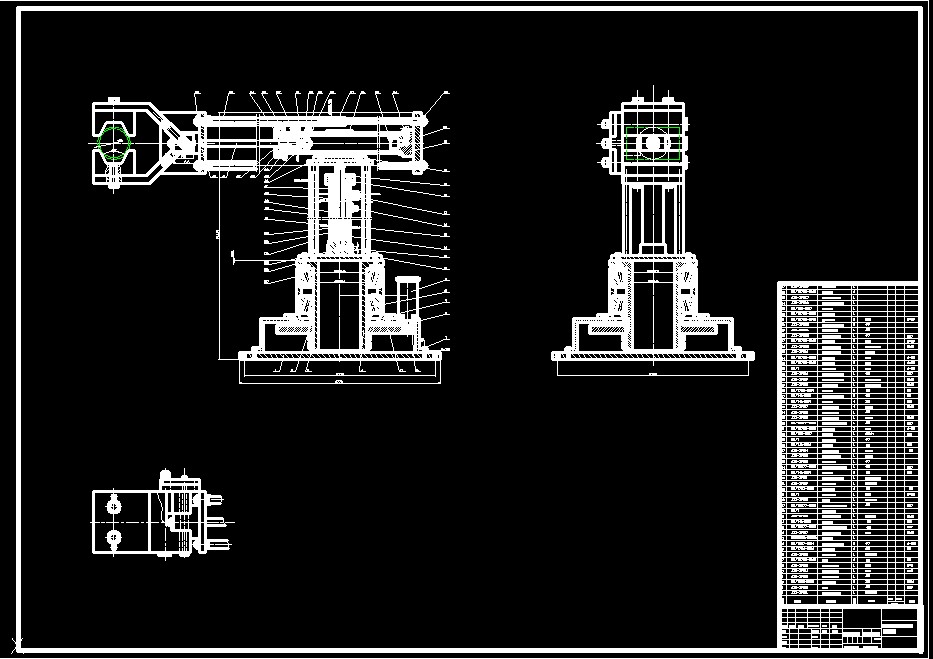
- 3個自由度搬運機械手設計該方案是3個自由度搬運機械手設計, 一般來說,機械手主要有以下幾部分組成:1. 手部(或稱抓取機構):包括手爪、傳力機構等,主要起抓取和放置物件的作用;2. 傳送機構(或稱臂部):包括手腕、手臂等,主要起改變物件方向和位置的作用;3. 驅動部分:它是前兩部分的動力,因此也稱動力源,常用的有液壓、氣壓、電力和電機四種驅動形式; 4. 控制部分:它是機械手動作的指揮系統,由它來控制動作的順序(程序)、位置和時間(甚至速度與加速度)等;5. 其它部分:如機體、行走機構、行程檢測裝置和傳感裝置等。
總設計流程,說明如下:
(1)控制系統:任務是根據機械手的作業指令程序和傳感器反饋回來的信號,控制機械手的執行機構,使其完成規定的運動和功能。主要設計目標為CPU的選擇,CPU程序的編寫調試等。
(2)驅動系統:驅動系統工作的驅動裝置。
(3)機械系統:包括機身、機械臂、手腕、手爪。需要確定其自由度、坐標形式,并計算得出具體結構。
(4)感知系統:即傳感器的選擇及具體作用。
搬運機械手的基本參數:
1. 機械手的最大搬運物料的重量是它的主參數。本論文物料傳送機械手所搬運的物料質量可設定為5kg。
2. 運動速度直接影響機械手的動作快慢和機械手動作的穩定性,所以運動速度也是是物料物料傳送機械手的一個主要的基本參數。設計速度過低的話,會無法滿足機械手的動作功能,限制機械手的使用范圍。設計的速度過高又會加重機械手的負載并影響機械手動作的平穩性。該機械手的最大平移速度為1m/s。
3. 伸縮行程和工作半徑是決定機械手工作范圍及整機尺寸的關鍵,也是機械手設計的基本參數。過大的工作半徑和伸縮行程,會增大機械手的運動負載,使得機械手剛性降低,而工作半徑過小則不能夠實現機械手的功能,限制了機械手的應用和擴展性。本論文物料傳送機械手設定水平反向伸縮行程200mm,回轉角度范圍為90°。機械手豎直方向的升降行程為100mm。
4.定位精度也是機械手的主要基本參數之一。機械手精度太低,就完成不了功能,精度太高又意味著成本的增加。綜合考慮,該物料傳送機械手的定位精度設定為士0.5到士1mm之間。物料傳送機械手的各個部分的基本參數可以由上面已經知道的物料傳送機械手各關節的行程和時間分配來決定。...
 熱門關鍵詞:
熱門關鍵詞: 

