碼跺機器人原理結構說明
- 文件介紹:
- 該文件為 doc 格式,下載需要 5 積分
-
- 碼跺機器人原理結構說明
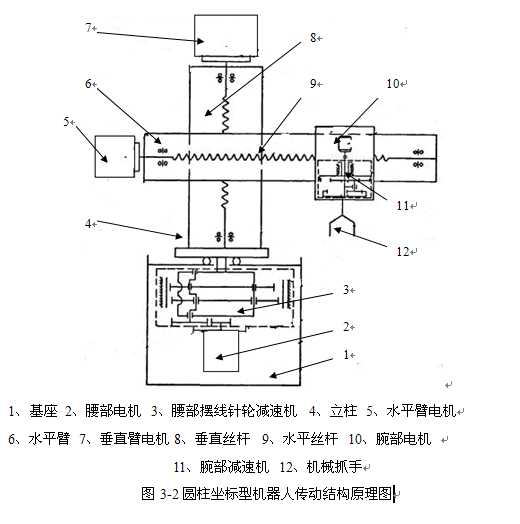
四自由度圓柱坐標型機器人傳動結構原理如圖3-2所示,四個自由度獨立控制,臂部和腕部繞腰部做旋轉運動,上下移動臂和伸縮臂的運動都能改變末端執行器的位置。腰部的旋轉由電機經減速器驅動,減速比的設計需要根據負載轉動和電機轉子轉動慣量的比來確定,由于負載轉動慣量相對于電機轉子轉動慣量來說是巨大的,所以腰部電機與負載之間將需要一個很大的減速比。臂部的上下、伸縮運動由電機經減速器和絲杠實現,減速器的設計是為了使負載轉動慣量和電機轉子慣量的匹配,另一方面,使用同步齒形帶減速可以隔離電機振動,絲杠的作用是把電機的旋轉運動轉換為臂的移動。腕部的旋轉運動方案與腰部類似,主要考慮因素是負載轉動慣量。為了減少設計和開發的時間,本方案的垂直和水平臂直接引用MISUMI廠家兩軸機器人標準模塊。...
 熱門關鍵詞:
熱門關鍵詞: 

