7799国产精品久久久久99,欧美成人精品一区二三区在线观看,好紧好湿好滑好爽好大,国产嘿嘿嘿视频在线观看
╩ūĒō
ÖCąĄłD╝ł
╚²ŠS─Żą═
«ģśIŻ»šn│╠įOėŗ
╝╝ąg╬─Ön
▄ø╝■Ž┬▌d
╦č╦„
Ė▀╝ē╦č╦„
¤ßķTĻPµIį~Ż║
╬╗ų├:
╩ūĒō
>
╚²ŠS─Żą═
╚½Ąžą╬┬─Ħ╩Į▌åę╬
╬─╝■┤¾ąĪ
Ż║49.36 MB
Ž┬▌d┤╬öĄ
Ż║
╬─╝■įu╝ē
Ż║
Ė³ą┬Ģrķg
Ż║2022-10-20
░l ▓╝ ╚╦
Ż║
xclfwy18
╬─╝■Ž┬▌dŻ║
╬─╝■ĮķĮBŻ║
įō╬─╝■×ķ zip Ė±╩ĮŻ¼Ž┬▌dąĶę¬
10
ĘeĘų
╚½Ąžą╬┬─Ħ╩Į▌åę╬
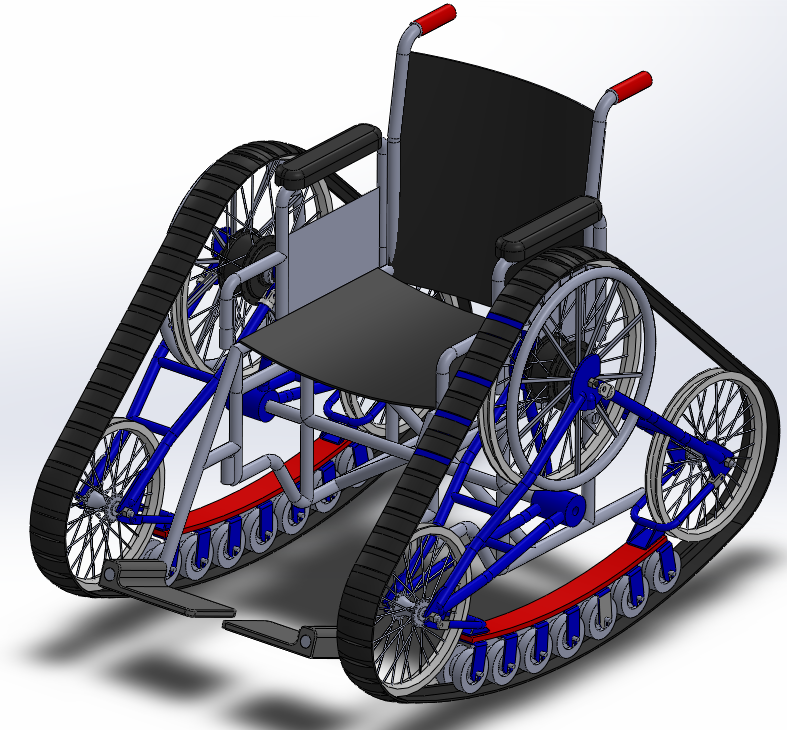
╚½Ąžą╬┬─Ħ╩Į▌åę╬─Żą═łDŻ¼▀@╩Ū╬ęĄ─╩ųäė╚½Ąžą╬┬─Ħ▌åę╬Ą─Ė┼─ŅĪŻ▄ēĄ└ĮM╝■▀BĮėĄĮś╦£╩Ą─┐╔š█»B▌åę╬┐“╝▄╔ŽĪŻ╩ų▌å“īäėNuvinci CVT╗“Shimano Alfine 11╦┘ąąąŪ▌å▌×ūā╦┘Ų„Ą─▌ö╚ļ▌SĪŻ▀@ą®╠ß╣®┴╦380%ų┴408%Ą─Ön╬╗▀xō±Ż¼ę“┤╦ė├æ¶─▄ē“į┌Ą═ÖnĘČć·ā╚▌p╦╔▐DÅØ╗“┼└ČĖŲ┬Ż¼═¼Ģrį┌Ė▀ÖnĘČć·ā╚╚į╚╗─▄ē“į┌ŲĮĄž╔Ž▒Ż│ų▀m«öĄ─╦┘Č╚ĪŻõō░ÕÅŚ╗╔æę╝▄▒Ż│ų┴╦╚ß║═Ą─ąą±éŻ¼═¼Ģrį┌┬─Ħ┐é│╔Ą─ųąą─╠ß╣®┴╦ę╗éĆąĪĄ─Įėė|³cŻ¼ęį£p╔┘▐DÅØ─”▓┴ĪŻŽ─z┬─Ħ╩ŪüĒūįVercoTrackĄ─VTR-050▌pą═ÖCŲ„╚╦┬─ĦĪŻ┼c╬ęūŅ│§Ą─╚½Ąžą╬┬─Ħ╩Į▌åę╬įOėŗŽÓ▒╚Ż¼▀@ĘN┬─Ħ╩Į▌åę╬Ą─Ė┼─Ņėą═¹┤¾Ę∙ĮĄĄ═ųŲįņ│╔▒ŠŻ¼ęį▒Ń╚╦éāį┌╬┤üĒųŲįņ╗“┘Å┘IĢrĖ³╝ė║Ž└Ē...
╬─Ön┴¶čį
“×ūC┤a:
┐┤▓╗ŪÕ│■,ōQę╗éĆ
Ė³ČÓ..
ŽÓĻP╬─Ön
1
╚½Ąžą╬▌p┐©CATIA─Żą═
2
ļŖäė╚½Ąžą╬▄ć
3
13-DTV Shredder╚½Ąžą╬┬─Ħ╗¼░Õ▄ćįOėŗłD
4
╚½Ąžą╬ę║ē║Ų¹▄ćŲųžÖC
5
13-DTV Shredder╚½Ąžą╬┬─Ħ╗¼░Õ▄ćįOėŗłD
6
╚½Ąžą╬Ų¹▄ćįOėŗ
7
╚½Ąžą╬┴’▒∙ą¼čź
8
╚½Ąžą╬╗¼░ÕčźĖ┼─Ņ─Żą═3DłD╝ł x_t STEPĖ±╩Į
9
4x4╚½Ąžą╬å╬ū∙┬─Ħ▄ć─Żą═3DłD╝ł Solidworks
10
╚½Ąžą╬▄ć┐é│╔
Ė³ČÓ..
ūŅą┬╬─Ön
1
Ņw┴Ż▌ö╦═╠¶▀xÖC
2
ąŻ£╩▌ö╦═ÖC
3
õō╣▄ŪąöÓš█ÅØÖC
4
ūįäėĘŌ┤³ÖC
5
ūįäė╣Óčb╔·«aŠĆ
6
ÜŌäėūź┴ŽŖA╩ų
7
╚½Ąžą╬┬─Ħ╩Į▌åę╬
8
┐šÜŌā”┤µ╣▐
9
ØL═▓▌ö╦═ÖCįOėŗ
10
ŲżÄ¦▌ö╦═ÖCįOėŗ
Ė³ČÓ..
¤ßķT╬─Ön
1
solidworksą═▓─Äņ
2
SWĮYśŗśŗ╝■Äņ
3
UGųąć°ć°╝ęś╦£╩╝■Äņ
4
’wÖCCAD╚²ŠSłD
5
┴∙▌SÖCŲ„╚╦╚½╠ūłD╝łūŅ╚½
6
SEW£p╦┘ļŖÖC3D─Żą═
7
ę║ē║╣▄ĮėŅ^Ż©SolidWorks─Żą═Ż®
8
▌S│ąū∙Ż©SolidWorks─Żą═Ż®
9
╦«▒├╚²ŠSłD
10
6▌SÖCąĄ╩ų3D─Żą═╚²ŠSłD╝ł
ÖCąĄĄ█ć°
 ¤ßķTĻPµIį~Ż║
¤ßķTĻPµIį~Ż║