爬壁機器人作品三維模型
- 文件介紹:
- 該文件為 rar 格式,下載需要 20 積分
-
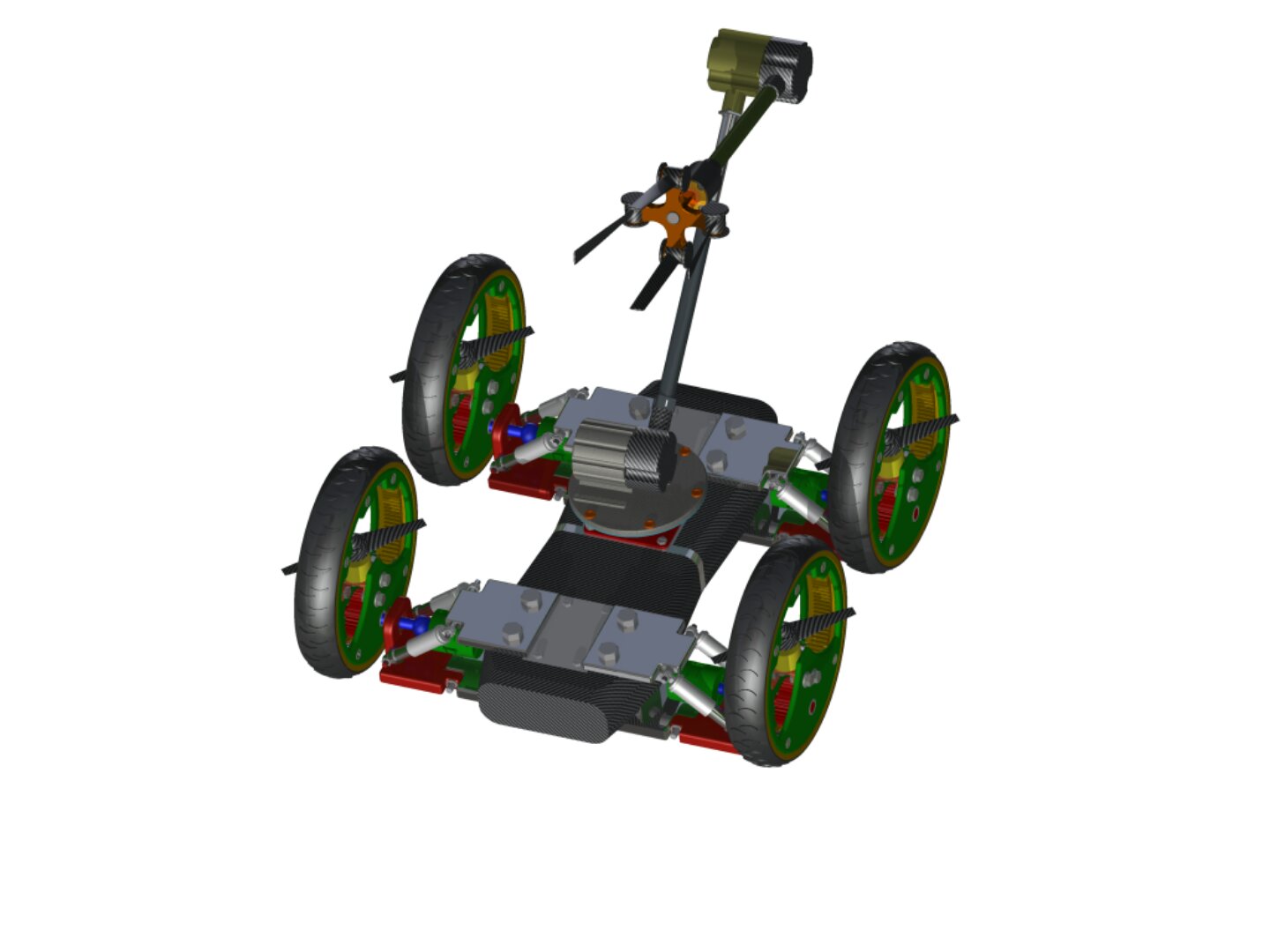
- 基本原理即讓車能在墻上跑,就需要提供一個指向墻面的壓力,創(chuàng)新性的采用螺旋槳反轉推壓的方式提供貼附墻壁的附著壓力,進行爬壁運動。傳統(tǒng)的爬壁機器人根本無法克服粗糙、復雜的地形,螺旋槳反推再加上萬向折腰系統(tǒng)可以實現(xiàn)任何墻面的運動,萬向折腰系統(tǒng)主要是通過中間的套筒連接實現(xiàn)機器人底盤的前后兩部分可以自由的擺動,保證每個輪子都接觸墻面。采用電機驅動,機構簡單可靠,可以通過單片機控制電機轉速實時調節(jié)吸附力,能夠適用各種地形,且攀爬速度快,噪音小,適合執(zhí)行高層樓宇人質救援及消防等任務。...
 熱門關鍵詞:
熱門關鍵詞: 

